|
|
BMe Research Grant |
|

Szilassy Péter Ákos
BMe Research Grant - 2023
![]()
Kandó Kálmán Doctoral School of Transportation and Vehicle Engineering
BME KJK, Department of Transport Technology and Economics
Supervisor: Dr. Földes Dávid
Design and operation methods of electric bus services based on energy consumption
Introducing the research area
My research focuses on the electrification of the urban bus service. I developed methods for estimating the consumption of electric buses (battery electric bus, trolleybus), planning the changing infrastructure, estimating operating costs, and determining the compliance indicator of a bus.
Brief introduction of the research place
BME Electromobility Research Group: The research group operates at the BME KTKG department. The group's activities cover the entire field of electromobility, from revealing user behaviors, through the planning and operation of mobility services to the analysis of environmental impacts. The research group considers electromobility as an integrated system; the goal is the joint optimization of vehicles, transport, and electricity networks.
History and context of the research
Traffic congestion and emissions are the main transport-related problems in our modern cities, built more than a century ago. The first problem can be solved by public transport, which allows trips to be made in smaller and more concentrated places, at higher speeds, preferably on a closed and fixed track, but in many cases on public roads, by means of bus services. Regarding emissions, the increased local emissions caused by private and public transport should be investigated. The solution to the problem of emissions caused by road public transport may be electric or any other alternative-powered buses (Dyr et al., 2018). In terms of electric operation, these vehicles have either a static (battery electric bus) or a dynamic charging system (trolley bus) (Lajunen, 2014; Manzolli, 2022). However, operators, service providers, and decision-makers have a superficial knowledge of electric buses, and the decision to purchase a vehicle is not sufficiently well-founded. The reason is that electric bus technology is less widespread, and the trolley bus system is often rejected on other grounds (e.g., cityscape impact).
The research goals, open questions
The aim of my research is to develop a calculation method for energy consumption estimation, taking into account several factors influencing consumption. The novelty of the method is that in this way the energy consumption of a bus can be estimated without the knowledge of any consumption data, merely based on a driving dynamics calculation determined by the current acceleration force and speed. A further goal was to develop methods based on the aforementioned energy consumption calculation to support the planning (e.g., vehicle selection, charging infrastructure selection) and operation. I plan to use these scientific results as tangible methodologies for industrial projects.
The consumption of electric buses is related to two main parts: (a) driving dynamics and (b) auxiliary operation systems. Most of the research deals with the modeling of the driving dynamics system, the determination of the appropriate acceleration curve, and the driving style (Csonka, 2021; Dirks et al., 2022; Lee et al., 2021). Regarding the auxiliary operation system, the energy consumption fluctuations resulting from the operation of the cooling-heating system are the most significant (can be as high as up to 8–10 times at the peak) (Bartłomiejczyk and Kołacz, 2020; Göhling et al., 2015, Corazza et al., 2021). The question to be answered was how to model and predict energy consumption fluctuations.
Many researchers are aimed at the development of charging infrastructure planning methods. The optimal design of the catenary system of trolleybuses (minimum length overhead line section) is possible with an error of 7%, taking into account the energy demand and mileage (Baumeister et al., 2021; Paternost et al., 2019). In the case of static charging, the two most investigated areas are the designation of the charger location and the determination of charging and battery capacities (Lin et al., 2019; Wang X. et al., 2017; Wu et al., 2021). The research questions were as follows. How can previously established overhead line sections be considered? What are the costs of different types of charging strategies and how much does it cost to operate the vehicles either on a distance or time basis? What costs are associated with an electric bus/trolley bus operation?
Due to the high purchase price, choosing the right bus is essential. Using the TOPSIS method, it is possible to objectively select a solution that represents a real alternative based on predetermined criteria. Previously, this method was used for the selection of electric vehicles (Hamurcu and Eren, 2022), monorail solutions (Hamurcu and Eren, 2017), and even electric buses (Hamurcu et al., 2020). The research question was whether or not the suitability of the vehicle for a given line can be determined by considering basic vehicle and route parameters.
Methods
A, Energy consumption estimation: The driving dynamics energy consumption calculation means the determination of the energy required to move and propel the vehicle. The developed calculation method for dynamic energy consumption considered motion, position, and resistance energies (Szilassy and Földes, 2022; Szilassy and Földes, 2023). Using the graph-based physical model, the path of a vehicle between two stops can be described, where the nodes are the stops, points, and delimiters; while the edges represent sections (stop space), sub-sections, or phases. In Figure 1, I have plotted nodes and edges on an example velocity profile; the y-axis represents the vehicle speed, and the x-axis the time.
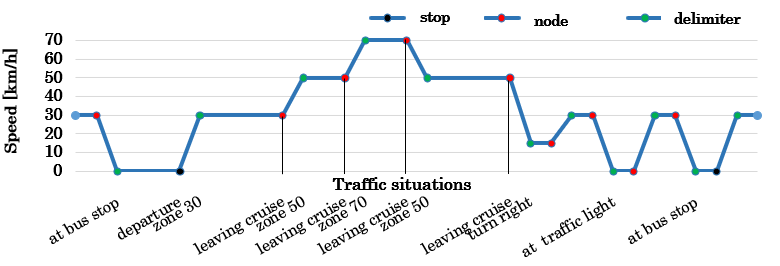
Figure 1: Speed profile example.
Based on the above, the total energy consumption of the drivetrain from the battery to the wheel is given for a complete run (with the summation of all sub-sections and phases). Similarly, the energy consumed by the auxiliary systems was determined for the entire drive. I identified the variables that most affect energy consumption: the topography, the stop distance, the passenger load, the ambient temperature, and the amount of traffic. I entered these factors as dependent variables in the energy consumption equations.
B, Infrastructure planning: During the infrastructure planning, I defined steps for the application of both static (battery electric bus) and dynamic charging infrastructure (trolley bus). After setting up the model and calculating the energy consumption, I defined the possible charging time and then estimated the chargeable energy. Based on these, I calculated the energy balance and then determined the number of vehicles and charging equipment needed. Finally, I determined the purchase cost based on the infrastructure elements (Földes et al., 2023; Szilassy et al., 2023).
C, Compliance Indicator design: To select the most suitable vehicle for a given situation, I developed a method for determining the Compliance Indicator (CI) (Figure 2). Next, I defined the vehicle and route parameters that characterize a bus line. I then considered the criteria that provided the input to the TOPSIS method. By specifying the exclusions, the compliance indicator and the ranking can be performed accordingly (Szilassy and Földes, 2023b; Szilassy and Földes, 2023d).
.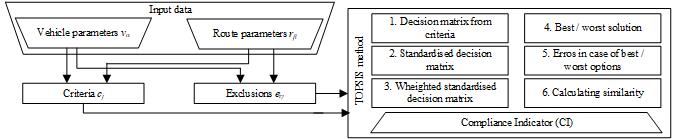
Figure 2: Steps of the method of determining the Compliance Indicator (CI).
D, Operating cost estimation: I developed an energy standard and total cost estimation method for a bus line, which relies on the cost elements in Table 1. I determined the total cost for the entire bus line (Szilassy et al., 2022).
Table 1: Cost elements and calculated costs per minute
|
Cost elements [USD] |
Original
calculation
base |
Calculated cost per minute [USD/min] |
Cost per
minute abbr.
[USD/min] |
|
Vehicle purchase cost |
per bus |
Vehicle depreciation cost per minute |
vdc |
|
Service and maintenance cost |
per year |
Service cost per minute |
sc |
|
Personnel cost |
per month |
Personnel cost per minute |
pc |
|
Energy cost |
casual |
(per bus line) |
- |
Results
A, Energy consumption estimation: Based on the results of the Nyíregyháza (Hungary) case study, there was a total of 5–6% difference in the consumption projected for the entire trip between the cases (a) when the vehicle stopped at all traffic lights and obstacles and (b) when it did not stop. This error is only 2–3% of the total consumption. The main reason for the small difference is that although the vehicle accelerates a lot in case (a) due to the stops, this acceleration does not cause significant excess energy consumption compared to case (b) when the vehicle should travel at a constant and higher speed. Figure 3 shows the relationship between calculated and measured consumption. The calculated consumption can be found on the horizontal axis, while the exact measured values are along the vertical axis. The light green points indicate the inward direction, while the dark green points indicate the outward direction considering only the driving dynamic consumption. The light purple points indicate the inward direction, while dark purple points indicate the outward consumption data considering the total consumption. The deviation can be interpreted as the distance from the fitted line y = x. Analyzing the standard deviation of the points, the difference is smaller for the driving dynamic consumption compared to the significant difference observed for the total consumption. The calculation of the driving dynamic consumption is more accurate than the standard deviation of these values. On the other hand, the difference in total consumption is larger, but it also falls below 5% on average.
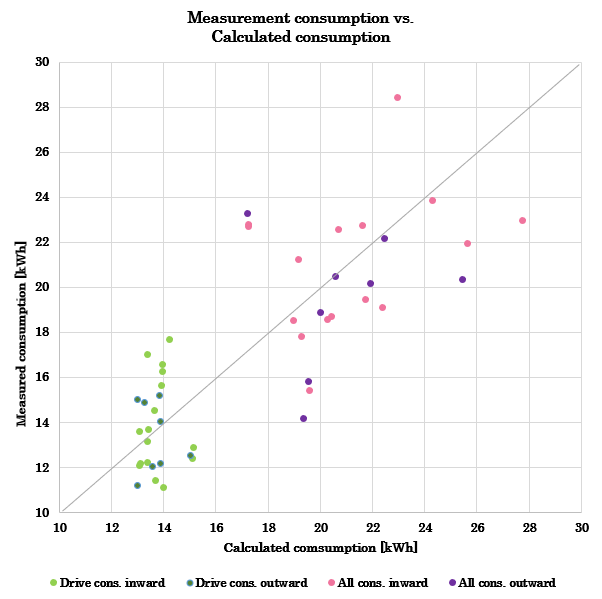
Figure 3: Comparison of calculated and measured consumption.
B, Infrastructure planning: As a case study, I examined bus line groups in Budapest. In Table 2, I have summarized the main attributes of three scenarios of bus lines running along the Rákóczi út, Budapest. The scenarios differ in the length of the catenary section and the battery capacity of the trolleybuses needed. Battery operation is necessary due to driving on sections without catenary systems.
Table 2: The minimum nominal battery capacity of the trolleybuses used per scenario (based on July 2022 data)
|
Bus line |
Trolleybus scenarios (A, B, C) |
||
|
Ferenciek t. – Bosnyák t. |
BAH csp. - Zugló vá. |
BAH csp. - Zugló vá. +Budafoki út |
|
|
5 |
not served |
not served |
100 kWh |
|
7 |
100 kWh |
100 kWh |
100 kWh |
|
7E |
50 kWh |
50 kWh |
50 kWh |
|
8E |
not served |
100 kWh |
100 kWh |
|
108E |
not served |
100 kWh |
100 kWh |
|
110 |
50 kWh |
50 kWh |
50 kWh |
|
110E |
50 kWh |
50 kWh |
50 kWh |
|
. 112 |
50 kWh |
50 kWh |
50 kWh |
|
133E |
not served |
not served |
100 kWh |
"C" trolleybus scenario proved to be the most cost-efficient version, which has the longest catenary section but without a need for battery electric buses and static terminal chargers as each line can be served by trolleybuses having autonomous capacity. The total cost of version "C" is 2/3 of the total cost of the version using pure battery electric buses and static terminal chargers. The main reason for this is that the increased fleet size and the higher purchase price of battery-operated electric buses compared to trolleybuses greatly increase costs. Accordingly, the best solution for the electrification of this bus line group is the use of trolleybuses with autonomous capability applying dynamic catenary charging on the common section.
C, Compliance Indicator design: In Table 3, I summarized the main parameters of the most suitable vehicle type based on the result of the Budapest case study.
Table 3: The most suitable vehicle type and its parameters
|
Bus line |
Type |
Design |
Max. power
[kW] |
Ave. consumption
[kWh/km] |
Battery
[kWh] |
Charging
|
Passenger |
Curb |
|
21/133E/100E |
Solaris
12 |
single |
250 |
0.9 |
240 |
450 |
90 |
19000 |
|
21A |
Temsa
MD9 |
midi |
200 |
1.1 |
200 |
120 |
65 |
14000 |
|
27/27A/16/16A/181 |
Evopro
C68 |
midi |
160
|
0.62 |
144 |
60 |
55 |
10350
|
|
46 |
Optare
Solo |
single |
150 |
0.51 |
138 |
42 |
55 |
11300 |
The same buses were found to be the best in various conditions with similar route characteristics, so it is not necessary to operate a diverse fleet; a few specific models are sufficient. Vehicles with a more powerful engine proved to be the best in mountain areas with low and high passenger traffic (Volvo, Ebusco, Sileo, Solaris), while on long mountain routes (steeply uphill) shorter buses perform the best due to their weight (e.g., Evopro C68).
D, Operating cost estimation: Considering the energy cost as a variable cost, Figure 4 shows the dependence of the total consumption rate on temperature and passenger load in three dimensions, from which the energy cost can be received directly (e.g., @1 kWh=100 HUF).
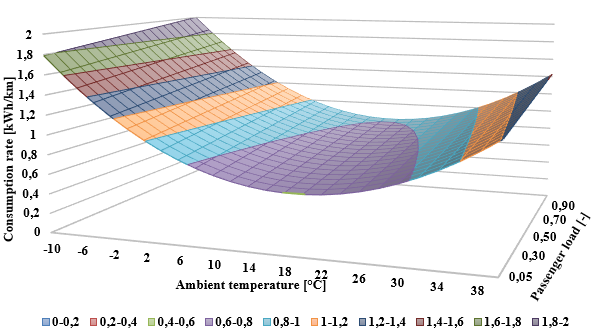
Figure 4: Total consumption per kilometer depending on passenger load and ambient temperature in case of normal traffic.
Expected impact and further research
The results of the research have important implications for the planning of the electrification of the urban bus network. The Research Group already used the energy estimation method developed in the frame of the EfficienCE project launched by the BKK Centre for Budapest Transport in 2022. Our research group launched a startup initiative called Bolley, where we deal with the electrification of bus transport by developing a planning and optimization method. In the future, the energy consumption method, and thus each presented method, can be further developed, and the parameters can be specified more precisely by managing traffic congestion and travel speed. A similar calculation can be made for other vehicles with alternative propulsion (e.g., hydrogen-powered).
Publications, references, links
List of corresponding own publications.
Peer-reviewed WoS IF journal articles in English:
(Szilassy és Földes, 2022) Szilassy, Péter Ákos, & Földes, Dávid. (2022). Consumption estimation method for battery-electric buses using general line characteristics and temperature. Energy (Oxford, England), 261(125080), 125080., https://doi.org/10.1016/j.energy.2022.125080, (IF: 8,8, Q1)
(Szilassy és Földes, 2023c) Szilassy, Péter Ákos, & Földes, Dávid. (2023). Compliance Indicator determination for a case study of Budapest. Energy Conversion and Management, (IF: 11,5, Q1) – submitted.
Peer-reviewed journal in English without IF:
(Szilassy és Jenőfi, 2022) Szilassy, Péter Ákos, & Jenőfi, Bence. (2022). A systematic approach to connected services in the urban environment. Institutiones Administrationis, 2(1), 195–205. https://doi.org/10.54201/iajas.v2i1.25
Peer-reviewed scientific book chapter in English:
(Földes és mtsai, 2023) Földes, Dávid, Csonka, Bálint, Szilassy, Péter Ákos. (2023). Urban bus network electrification, Intech open – Public transport book chapter, ISBN: 978-1-83768-719-0, https://doi.org/10.5772/intechopen.111940
Peer-reviewed scientific article published conference publication in English:
(Szilassy és Földes, 2023d) Szilassy, Péter Ákos, Földes, Dávid. (2023?). What route an electric bus should run? Compliance Indicator determination method to match electric buses with routes. EC-TRA 2022 Lisbon conference – under publication
(Szilassy és mtsai, 2022) Szilassy, Péter Ákos, Jenőfi, Bence, & Földes, Dávid. (2022). Marginal energy consumption cost factors of battery electric buses. 2022 Smart City Symposium Prague (SCSP). https://doi.org/10.1109/SCSP54748.2022.9792553
(Szilassy és mtsai, 2020) Szilassy, Péter, Németh, Balázs, & Gáspár, Péter. (2020). Predictive speed control for automated vehicles in urban areas using speed zones. 2020 IEEE 18th International Symposium on Intelligent Systems and Informatics (SISY). https://doi.org/10.1109/SISY50555.2020.9217096
(Szilassy és mtsai, 2019b) Szilassy, Péter, Németh, Balázs, Gáspár, Péter, Szauter, Ferenc, & Pup, Dániel. (2019). Robustness analysis and reconfiguration strategy of autonomous vehicles in intersections. 2019 IEEE 13th International Symposium on Applied Computational Intelligence and Informatics (SACI). https://doi.org/10.1109/SACI46893.2019.9111527
(Szilassy és mtsai, 2019a) Szilassy, Péter, Németh, Balázs, & Gáspár, Péter. (2019). Design and robustness analysis of autonomous vehicles in intersections. IFAC-PapersOnLine, 52(8), 321–326. https://doi.org/10.1016/j.ifacol.2019.08.090
Peer-reviewed journal article in Hungarian:
(Szilassy és mtsai, 2023) Szilassy, Péter, Földes, Dávid, Csonka, Bálint. (2023). Autóbuszhálózat elektrifikációja. Közlekedés és Mobilitás – accepted, under publication
(Szilassy és Földes, 2023a) Szilassy, Péter Ákos & Földes, Dávid. (2023). Akkumulátoros elektromos autóbuszok fogyasztásának becslése vonali jellemzők és hőmérséklet figyelembevételével. Közlekedéstudományi Szemle, 73 (1). pp. 38-56. ISSN 0023-4362 https://doi.org/10.24228/KTSZ.2023.1.3
Peer-reviewed scientific article published conference publication in Hungarian:
(Szilassy és Földes, 2023b) Szilassy, Péter, Földes, Dávid (2023) Megfelelési tényező meghatározási módszer elektromos buszok buszvonalakhoz való illesztésére, 673-682, KTE-CoTS (Győr) ISBN: 9786156443175
Table of links
MTMT: https://m2.mtmt.hu/gui2/?type=authors&mode=browse&sel=10067340
Research Gate:
https://www.researchgate.net/profile/Szilassy-Peter-Akos
GScholar:
https://scholar.google.com/citations?user=9AOMkzgAAAAJ
ORCID:
https://orcid.org/0000-0001-5069-8281
Primary research group:
https://www.linkedin.com/company/bme-electromobility-research-group/
Secondary research group:
https://www.linkedin.com/company/bme-transport-systems-and-mobility-services-research-group/
Application developed by a research group:
https://zoldkerek.bme.hu/
A startup initiative founded by a research group:
http://bolley.hu/
Department website:
https://ktkg.bme.hu/
List of references.
Bartłomiejczyk, M., & Kołacz, R. (2020). The reduction of auxiliaries power demand: The challenge for electromobility in public transportation. Journal of Cleaner Production, 252(119776), 119776. https://doi.org/10.1016/j.jclepro.2019.119776
Baumeister, D., Wazifehdust, M., Salih, M., Zdrallek, M., Von Kalben, C., & Schumacher, J. O. (2021). Optimal Catenary Planning of Trolleybus Systems. ETG Congress.
Corazza, M., Conti, V., Genovese, A., Ortenzi, F., & Valentini, M. P. (2021). A procedure to estimate air conditioning consumption of urban buses related to climate and main operational characteristics. World Electric Vehicle Journal, 12(1), 29. https://doi.org/10.3390/wevj12010029
Csonka, B. (2021). Optimization of static and dynamic charging infrastructure for electric buses. Energies, 14(12), 3516. https://doi.org/10.3390/en14123516
Dirks, N., Schiffer, M., & Walther, G. (2022). On the integration of battery electric buses into urban bus networks. Transportation Research. Part C, Emerging Technologies, 139(103628), 103628. https://doi.org/10.1016/j.trc.2022.103628
Dyr, T., Ziółkowska, K., Misiurski, P., & Kozłowska, M. (2018). Effectiveness of application alternative drive vehicles in public transport. MATEC Web of Conferences, 180, 01002. https://doi.org/10.1051/matecconf/201818001002
Göhlich, D., Ly, T.-A., Kunith, A., & Jefferies, D. (2021). A procedure to estimate air conditioning consumption of urban buses related to climate and main operational characteristics. World Electr Veh J, 12(1), 29. https://doi.org/10.3390/wevj12010029
Hamurcu, M., & Eren, T. (2017). Selection of Monorail Technology by Using Multicriteria Decision Making. Sigma J. Eng. Nat. Sci, 8, 303–314. https://doi.org/10.3390/math7010016
Hamurcu, M., & Eren, T. (2022). Applications of the MOORA and TOPSIS Method for Decision of Electric Vehicle in Public Transportation Technology. https://doi.org/10.3846/transport.2022.17783
Hamurcu, Mustafa, & Eren, T. (2020). Electric bus selection with multicriteria decision analysis for green transportation. Sustainability, 12(7), 2777. https://doi.org/10.3390/su12072777
Lajunen, A. (2014). Energy consumption and cost-benefit analysis of hybrid and electric city buses. Transportation Research. Part C, Emerging Technologies, 38, 1–15. https://doi.org/10.1016/j.trc.2013.10.008
Lee, J., Shon, H., Papakonstantinou, I., & Son, S. (2021). Optimal fleet, battery, and charging infrastructure planning for reliable electric bus operations. Transportation Research. Part D, Transport and Environment, 100(103066), 103066. https://doi.org/10.1016/j.trd.2021.103066
Lin, Y., Zhang, K., Shen, Z.-J. M., Ye, B., & Miao, L. (2019). Multistage large-scale charging station planning for electric buses considering transportation network and power grid. Transportation Research. Part C, Emerging Technologies, 107, 423–443. https://doi.org/10.1016/j.trc.2019.08.009
Manzolli, J. A., Trovão, J. P., & Antunes, C. H. (2022). A review of electric bus vehicles research topics – Methods and trends. Renewable and Sustainable Energy Reviews, 159(112211), 112211. https://doi.org/10.1016/j.rser.2022.112211
Paternost, R. F., Mandrioli, R., Barbone, R., Ricco, M., Cirimele, V., & Grandi, G. (2022). Catenary-powered electric traction network modeling: A data-driven analysis for trolleybus system simulation. World Electric Vehicle Journal, 13(9), 169. https://doi.org/10.3390/wevj13090169
Wang, X., Yuen, C., Hassan, N. U., An, N., & Wu, W. (2017). Electric vehicle charging station placement for urban public bus systems. IEEE Transactions on Intelligent Transportation Systems: A Publication of the IEEE Intelligent Transportation Systems Council, 18(1), 128–139. https://doi.org/10.1109/tits.2016.2563166
Wu, X., Feng, Q., Bai, C., Lai, C. S., Jia, Y., & Lai, L. L. (2021). A novel fast-charging stations locational planning model for electric bus transit system. Energy (Oxford, England), 224(120106), 120106. https://doi.org/10.1016/j.energy.2021.120106